Skip to content
Home
Projects
People
Courses
Seminar
CGAL Arrangement Book
Devices
Menu
Home
Projects
People
Courses
Seminar
CGAL Arrangement Book
Devices
Search
Search
Search
Search
Close this search box.
Home
»
Projects
Projects: Robust Geometric Computing and CGAL, Motion Planning, Robotics and Automation
Research Projects @ TAU
Course Projects @ TAU
Projects Using TAU Packages
All
Planet Earth
Localization with Few Distance Measurements
Coordination of Multiple Robots along Given Paths with Bounded Junction Complexity
Refined Hardness of Distance-Optimal Multi-Agent Path Finding
CGAL Python Bindings
Near-Optimal Multi-Robot Motion Planning with Finite Sampling
Collision Detection Between Neurons and Blood Vessels
On Two-Handed Planar Assembly Partitioning with Connectivity Constraints
Optimized Synthesis of Snapping Fixtures
Space-Aware Reconfiguration
Robust 2D Assembly Sequencing via Geometric Planning with Learned Scores
Maintaining the Union of Unit Discs Under Insertions with Near-Optimal Overhead
Throwing a Sofa Through the Window
The Critical Radius in Sampling-based Motion Planning
Scalable Asymptotically-Optimal Multi-Robot Motion Planning
Sampling-Based Bottleneck Pathfinding With Applications To Fréchet Matching
Probabilistic Completeness of RRT for Geometric and Kinodynamic Planning With Forward Propagation
Motion Planning for Multiple Unit-Ball Robots in \(\mathbb{R}^d\)
Optimal Area Polygonalization
On the Separation of a Polyhedron from Its Single-Part Mold
The Offset Filtration of Convex Objects
Motion Planning for Multi-Link Robots by Implicit Configuration-Space Tiling
Motion Planning for Unlabeled Discs with Optimality Guarantees
Exact Minkoski Sums of Polygons With Holes
Effective Metrics for Multi-Robot Motion-Planning
Efficient high-quality motion planning by fast all-pairs r-nearest-neighbors
PSPACE-hardness of unlabeled motion planning and variants
Asymptotically-Optimal Motion Planning using Lower Bounds on Cost
Asymptotically near-optimal RRT for fast, high-quality, motion planning
Efficient Multi-Robot Motion Planning for Unlabeled Discs in Simple Polygons
Finding a Needle in an Exponential Haystack: Discrete RRT for Exploration of Implicit Roadmaps in Multi-Robot Motion Planning
Sparsification of Motion-Planning Roadmaps by Edge Contraction
Planar Point Location – Depth vs. Max Query Length
k-Color Multi-Robot Motion Planning
Motion Planning via Manifold Samples
Sampling-Diagrams Automata: a Tool for Analyzing Path Quality in Tree Planners
Efficient retrieval of Minkowski sum of rotating polytopes
High Quality Conservative Surface Mesh Generation for Swept Volumes
Exact Voronoi Diagram of Arbitrary Lines in Space
Deconstructing Approximate Offsets
Constructing Approximate Offsets
Lines Through Segments
Improving Path Quality by a Path Merging Algorithm
Snap Rounding on the Sphere
Efficient Construction of Pathways in the Complement of the Union of Balls in R3
Polyhedral Assembly Partitioning with Infinite Translations
PathRover—Rapid Sampling and Optimization of Molecular Motions
Arrangements of Geodesic Arcs on the Sphere
A general framework for processing a set of curves defined on a continuous two-dimensional parametric surface
Two-Dimensional Voronoi Diagrams via Divide-and-Conquer of Envelopes
Exact and Efficient Construction of Planar Minkowski Sums using the Convolution Method
Exact and Approximate Construction of Offset Polygons
Arrangements of Bézier Curves
Planning Near Optimal Corridors
The Complexity of the Outer Face in Arrangements of Random Segments
Robust, Generic, and Efficient Construction of Envelopes of Surfaces in Three-Dimensional Space
On the Exact Maximum Complexity of Minkowski Sums of Convex Polyhedra
Landmarks Point Location
Dynamic Maintenance of Molecular Surfaces under Conformational Changes
Exact and Efficient Construction of Minkowski Sums of Convex Polyhedra with Applications
The Visibility-Voronoi Complex
Path Verification for NC-Machining
Controlled Perturbation for Arrangements of Circles
Speeding up the Inceremental Construction of the Union of Geometric Objects in Practice
Sweep Line
High Level Filtering with Conic Arcs
Hybrid Motion Planning
Improved Output-Sensitive Construction of Vertical Decompositions of Triangles in 3D
Largest Empty Rectangle
Line Segments and Circular Arcs
Minimum Enclosing Disc with Polygonal Obstacles
Minkowski Sums
Iterated Snap Rounding
Controlled Perturbation of Polyhedral Surfaces
Controlled Perturbation of Spherical Arrangements
Lower Envelopes of Planar Curves
On-line Zone Construction in Arrangements
Adaptive Point Location of Parametric Curves
Arrangements
Planar Maps
Window Cleaning Swarm Apparatus
DiscoPygal
Paranoid Android
Mini Supertanker
2D Part Orienting
Eroding 3D Parts
Converting GCode to STL
Path Following using Drones
Generating Grid Ogons and Ogons
ArtByAI Computers Creating Abstract Art by Artificial Intelligence
AGPPROJ – Solving Art Gallery Problems to Optimality
Kunst! Solutions to Art Gallery Problems
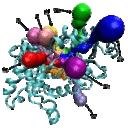
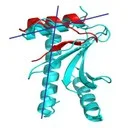
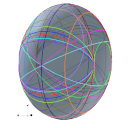
Symmetric Protein Structure Determination Using Arrangements of Circular Arcs
Analysis of Algebraic Surfaces
Arrangements of Algebraic Curves
Computation of the Metric Average of Two Simple Polygons and Extensions
Computing a single face in an arrangement of line segments
2D Arrangement Demonstration Program
Using CGAL for Robust Planar Geometry Processing in Agilent ADS
Inner-cover of Non-convex Shapes
Maximizing the Area of an Axis-Symmetric Polygon Inscribed by a Simple Polygon
CGAL Arrangement of IRIT Free-form Curves
Planet Earth
Localization with Few Distance Measurements
Coordination of Multiple Robots along Given Paths with Bounded Junction Complexity
Refined Hardness of Distance-Optimal Multi-Agent Path Finding
CGAL Python Bindings
Near-Optimal Multi-Robot Motion Planning with Finite Sampling
Collision Detection Between Neurons and Blood Vessels
On Two-Handed Planar Assembly Partitioning with Connectivity Constraints
Optimized Synthesis of Snapping Fixtures
Space-Aware Reconfiguration
Robust 2D Assembly Sequencing via Geometric Planning with Learned Scores
Maintaining the Union of Unit Discs Under Insertions with Near-Optimal Overhead
Throwing a Sofa Through the Window
The Critical Radius in Sampling-based Motion Planning
Scalable Asymptotically-Optimal Multi-Robot Motion Planning
Sampling-Based Bottleneck Pathfinding With Applications To Fréchet Matching
Probabilistic Completeness of RRT for Geometric and Kinodynamic Planning With Forward Propagation
Motion Planning for Multiple Unit-Ball Robots in \(\mathbb{R}^d\)
Optimal Area Polygonalization
On the Separation of a Polyhedron from Its Single-Part Mold
The Offset Filtration of Convex Objects
Motion Planning for Multi-Link Robots by Implicit Configuration-Space Tiling
Motion Planning for Unlabeled Discs with Optimality Guarantees
Exact Minkoski Sums of Polygons With Holes
Effective Metrics for Multi-Robot Motion-Planning
Efficient high-quality motion planning by fast all-pairs r-nearest-neighbors
PSPACE-hardness of unlabeled motion planning and variants
Asymptotically-Optimal Motion Planning using Lower Bounds on Cost
Asymptotically near-optimal RRT for fast, high-quality, motion planning
Efficient Multi-Robot Motion Planning for Unlabeled Discs in Simple Polygons
Finding a Needle in an Exponential Haystack: Discrete RRT for Exploration of Implicit Roadmaps in Multi-Robot Motion Planning
Sparsification of Motion-Planning Roadmaps by Edge Contraction
Planar Point Location – Depth vs. Max Query Length
k-Color Multi-Robot Motion Planning
Motion Planning via Manifold Samples
Sampling-Diagrams Automata: a Tool for Analyzing Path Quality in Tree Planners
Efficient retrieval of Minkowski sum of rotating polytopes
High Quality Conservative Surface Mesh Generation for Swept Volumes
Exact Voronoi Diagram of Arbitrary Lines in Space
Deconstructing Approximate Offsets
Constructing Approximate Offsets
Lines Through Segments
Improving Path Quality by a Path Merging Algorithm
Snap Rounding on the Sphere
Efficient Construction of Pathways in the Complement of the Union of Balls in R3
Polyhedral Assembly Partitioning with Infinite Translations
PathRover—Rapid Sampling and Optimization of Molecular Motions
Arrangements of Geodesic Arcs on the Sphere
A general framework for processing a set of curves defined on a continuous two-dimensional parametric surface
Two-Dimensional Voronoi Diagrams via Divide-and-Conquer of Envelopes
Exact and Efficient Construction of Planar Minkowski Sums using the Convolution Method
Exact and Approximate Construction of Offset Polygons
Arrangements of Bézier Curves
Planning Near Optimal Corridors
The Complexity of the Outer Face in Arrangements of Random Segments
Robust, Generic, and Efficient Construction of Envelopes of Surfaces in Three-Dimensional Space
On the Exact Maximum Complexity of Minkowski Sums of Convex Polyhedra
Landmarks Point Location
Dynamic Maintenance of Molecular Surfaces under Conformational Changes
Exact and Efficient Construction of Minkowski Sums of Convex Polyhedra with Applications
The Visibility-Voronoi Complex
Path Verification for NC-Machining
Controlled Perturbation for Arrangements of Circles
Speeding up the Inceremental Construction of the Union of Geometric Objects in Practice
Sweep Line
High Level Filtering with Conic Arcs
Hybrid Motion Planning
Improved Output-Sensitive Construction of Vertical Decompositions of Triangles in 3D
Largest Empty Rectangle
Line Segments and Circular Arcs
Minimum Enclosing Disc with Polygonal Obstacles
Minkowski Sums
Iterated Snap Rounding
Controlled Perturbation of Polyhedral Surfaces
Controlled Perturbation of Spherical Arrangements
Lower Envelopes of Planar Curves
On-line Zone Construction in Arrangements
Adaptive Point Location of Parametric Curves
Arrangements
Window Cleaning Swarm Apparatus
Planar Maps
DiscoPygal
Paranoid Android
Mini Supertanker
2D Part Orienting
Eroding 3D Parts
Converting GCode to STL
Path Following using Drones
Generating Grid Ogons and Ogons
ArtByAI Computers Creating Abstract Art by Artificial Intelligence
AGPPROJ – Solving Art Gallery Problems to Optimality
Kunst! Solutions to Art Gallery Problems
Symmetric Protein Structure Determination Using Arrangements of Circular Arcs
Analysis of Algebraic Surfaces
Arrangements of Algebraic Curves
Computation of the Metric Average of Two Simple Polygons and Extensions
Computing a single face in an arrangement of line segments
2D Arrangement Demonstration Program
Using CGAL for Robust Planar Geometry Processing in Agilent ADS
Inner-cover of Non-convex Shapes
Maximizing the Area of an Axis-Symmetric Polygon Inscribed by a Simple Polygon
CGAL Arrangement of IRIT Free-form Curves
Yair Oz - Webcreator
Contact
Mobile.
052-4703139
|
WhatsApp
Email.
[email protected]
Name
טלפון
אימייל
הודעה
Send
Skip to content
Open toolbar
Accessibility Tools
Accessibility Tools
Increase Text
Increase Text
Decrease Text
Decrease Text
Grayscale
Grayscale
High Contrast
High Contrast
Negative Contrast
Negative Contrast
Light Background
Light Background
Links Underline
Links Underline
Readable Font
Readable Font
Reset
Reset